| Name | Datentechnik / Technische Informatik |
|---|---|
| Art der Veranstaltung | Praktikum |
| Betreuer | Dr.-Ing. Björn Fiethe |
| Semester | Sommersemester |
| Termin | Fällt im Sommersemester 2024 aus! |
| Semesterwochenstunden | 4 |
| Prüfungsart | N/A |
| StudIP Link | https://studip.tu-braunschweig.de/... |
Leider gibt es Probleme mit dem Praktikum, daher muss das Praktikum dieses Semester ausfallen! Wir werden die Zeit nutzen und das Praktikum modernisieren und umstellen, sodass ab WS24/25 mehr Plätze pro Semester zur Verfügung stehen werden.
Der Versuchsumdruck enthält die theoretischen Grundlagen, die am ersten Termin durchgesprochen werden. Dazu zählen das Prinzip des DSO's, Tastköpfe, Grundlagen der Abtastung, Übergang zu höheren Abtastraten, Realzeit- und Äquivalenzzeit-DSO, Signaldarstellung Trigger- und Aquisitionsmoden. Am zweiten Termin werden verschiedene Pulsformen bis zu einer SPI-Schnittstelle mit einem DSO dargestellt und vermessen. Dabei sollen die in der Theorie behandelten Probleme erkannt und richtig behandelt werden werden.
Hilfreiche Vorkenntnisse (Module in Klammern):
Fourier-Transformation, Faltung (Mathe III), einfache Wechselstromrechnung (Grundl. der ET), Digital-Schaltungen (Technische Informatik II)

In diesem Versuch wird der Logikanalysator zur Messung digitaler Schaltungen behandelt. Im Skript werden der prinzipielle Aufbau und die Grundlagen behandelt, welche zunächst durchgesprochen werden. Hierauf aufbauend werden Messungen an Testschaltungen durchgeführt, welche die verschiedenen Betriebsmodi eines Logikanalysators demonstrieren.
Hilfreiche Vorkenntnisse:
Digital-Schaltungen (Modul Technische Informatik II)

Die heutigen Schaltungsentwürfe sind ohne Berücksichtigung der Leitungseffekte kaum noch funktionsfähig. Der vorliegende Versuch soll mit Hilfe einer neu aufgebauten vierlagigen Multilayer-Leiterplatte vermitteln, welche Effekte auftreten und welche Punkte beim Entwurf zu beachten sind. Es werden gezielt Reflexionen, Übersprechen, Ground-Bounce, Leitungslaufzeiten, Abschlüsse und Leitungstypen mit einem modernen MDO34 Oszilloskop untersucht. Da den wenigsten Studenten die Möglichkeit gegeben ist, im praktischen Entwurf Erfahrungen zu sammeln, soll mit diesem Versuch eine Brücke zwischen den theoretischen Abhandlungen und dem praktischen Erscheinungsbild geschaffen werden.
Hilfreiche Vorkenntnisse:
Signalausbreitung auf Leitungen (Modul Technische Informatik I)

In diesem Versuch soll eine Steuerungseinheit als synchrones Schaltwerk zum Auslesen eines Beschleunigungssensors über SPI-Schnittstelle programmiert und in dem vorhandenen Versuchsaufbau auf einwandfreie Funktion geprüft werden. Architektur und Zelltechnik der gängigen FPGAs, Typen und Eigenschaften der verschiedenen synchronen Schaltwerke sowie Entwicklungswerkzeuge für FPGA-Entwurf und -Programmierung werden prinzipiell dargestellt. Der Versuch wird mit einem USB-Entwicklungsboard mit entsprechenden modernen Entwickungsumgebung auf dem PC durchgeführt.
Hilfreiche Vorkenntnisse:
Programmierbare Logikbausteine (Modul Digitale Schaltungen)

In diesem Praktikum wird das Konzept von RISC-Prozessoren am Beispiel der DLX-Architektur vorgestellt. Das Skript behandelt die Grundschritte der Befehlsausführung, den Aufbau des Befehlssatzes und verschiedenen Techniken des Pipelinings. Im Rahmen des Versuchs sollen dann eigene Assemblerprogramme geschrieben und anschließend getestet werden. Hierzu steht ein Simulator namens WinDLX zur Verfügung.
Hilfreiche Vorkenntnisse:
Assemblerprogrammierung (Modul Rechnerstrukturen I)


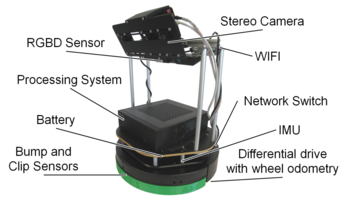
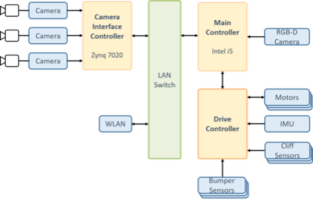
Im Versuch können gängige Konzepte für den Betrieb mobiler Roboter am praktischen Beispiel erprobt werden. Der Versuchsträger ist ein "Turtlebot 2", als Software kommt das Framework Robot Operating System (ROS) unter Linux zum Einsatz. Nach einer theoretischen Einführung wird zunächst die Kommunikation zwischen dem Roboter und dem Remote-PC aufgebaut um dann eine Visualisierung der Sensordaten vom Roboter auf dem Remote-PC einrichten zu können. Anschließend wird eine Teleoperation des Roboters vom Remote-PC aus implementiert und getestet. Dann folgt die simultane Positionsbestimmung und Kartierung (SLAM).
Hilfreiche Vorkenntnisse:
Linux